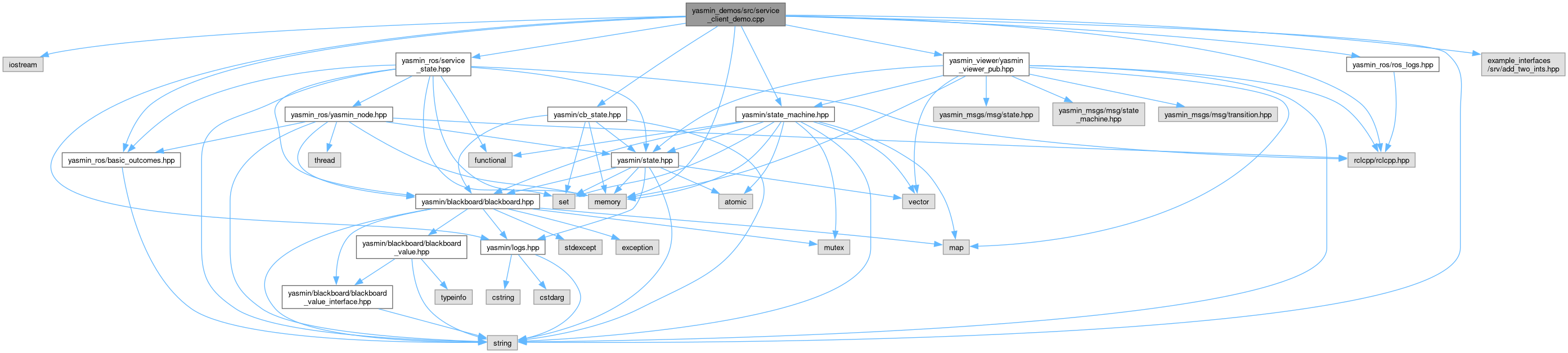
#include <iostream>#include <memory>#include <string>#include "example_interfaces/srv/add_two_ints.hpp"#include "rclcpp/rclcpp.hpp"#include "yasmin/cb_state.hpp"#include "yasmin/logs.hpp"#include "yasmin/state_machine.hpp"#include "yasmin_ros/basic_outcomes.hpp"#include "yasmin_ros/ros_logs.hpp"#include "yasmin_ros/service_state.hpp"#include "yasmin_viewer/yasmin_viewer_pub.hpp"
Include dependency graph for service_client_demo.cpp:
Classes | |
| class | AddTwoIntsState |
| State for calling the AddTwoInts service in ROS 2. More... | |
Functions | |
| std::string | set_ints (std::shared_ptr< yasmin::blackboard::Blackboard > blackboard) |
| Sets two integer values in the blackboard. | |
| std::string | print_sum (std::shared_ptr< yasmin::blackboard::Blackboard > blackboard) |
| Prints the sum stored in the blackboard. | |
| int | main (int argc, char *argv[]) |
| Main function to initialize and run the state machine. | |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char * | argv[] ) |
Main function to initialize and run the state machine.
Sets up logging, initializes ROS 2, and defines a state machine with three states.
- Parameters
-
argc Argument count. argv Argument vector.
- Returns
- int Exit code indicating success or failure.
◆ print_sum()
| std::string print_sum | ( | std::shared_ptr< yasmin::blackboard::Blackboard > | blackboard | ) |
Prints the sum stored in the blackboard.
Retrieves the integer "sum" from the blackboard and prints it.
- Parameters
-
blackboard Shared pointer to the blackboard for getting values.
- Returns
- std::string Outcome indicating success.
◆ set_ints()
| std::string set_ints | ( | std::shared_ptr< yasmin::blackboard::Blackboard > | blackboard | ) |
Sets two integer values in the blackboard.
Sets the integers "a" and "b" in the blackboard with values 10 and 5, respectively.
- Parameters
-
blackboard Shared pointer to the blackboard for setting values.
- Returns
- std::string Outcome indicating success or failure.
Generated by