get_parameters_state.cpp File Reference
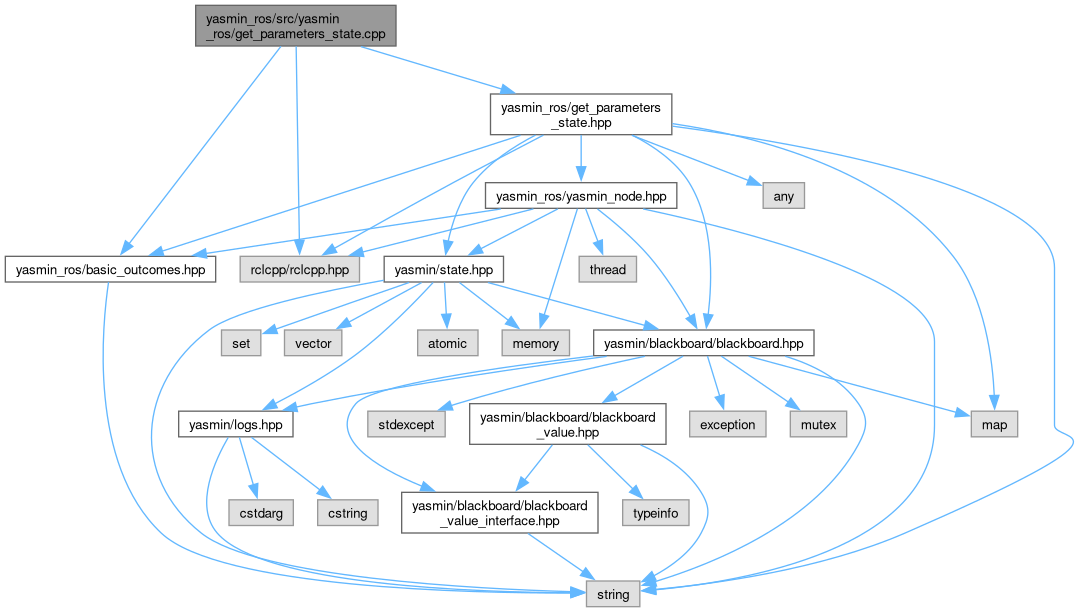
#include "rclcpp/rclcpp.hpp"#include "yasmin_ros/basic_outcomes.hpp"#include "yasmin_ros/get_parameters_state.hpp"
Include dependency graph for get_parameters_state.cpp:
Generated by
|
C++ YASMIN (Yet Another State MachINe)
|
#include "rclcpp/rclcpp.hpp"#include "yasmin_ros/basic_outcomes.hpp"#include "yasmin_ros/get_parameters_state.hpp"