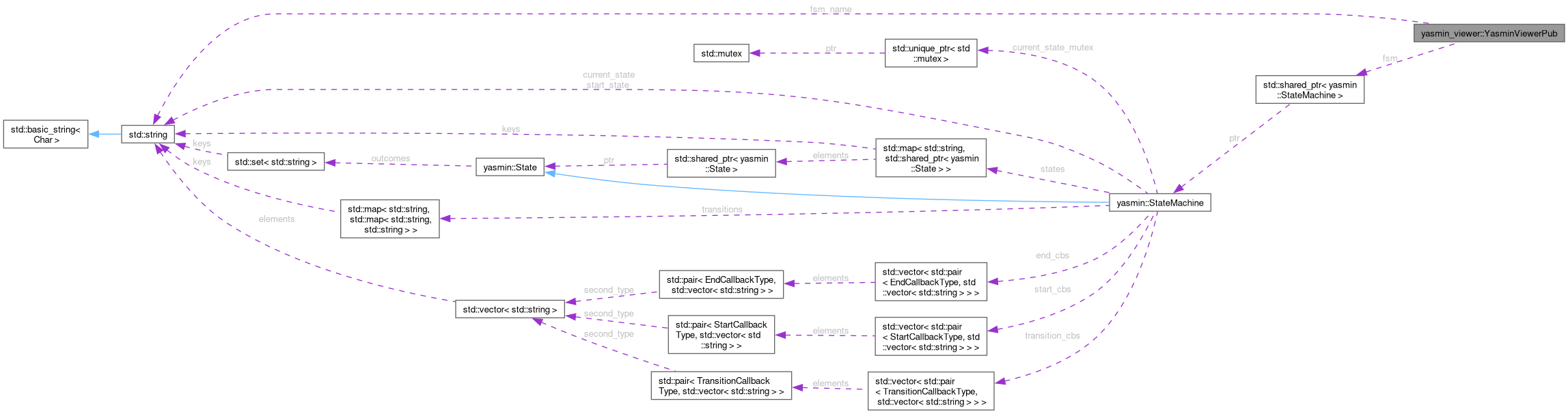
Publishes state machine data for visualization. More...
#include <yasmin_viewer_pub.hpp>
Public Member Functions | |
| YasminViewerPub (const rclcpp::Node::SharedPtr &node, std::string fsm_name, std::shared_ptr< yasmin::StateMachine > fsm) | |
| Constructs YasminViewerPub with a given ROS 2 node, state machine name, and state machine instance. | |
| YasminViewerPub (std::string fsm_name, std::shared_ptr< yasmin::StateMachine > fsm) | |
| Constructs YasminViewerPub with a default ROS 2 node instance, state machine name, and state machine instance. | |
| std::vector< yasmin_msgs::msg::Transition > | parse_transitions (std::map< std::string, std::string > transitions) |
| Parses transitions from a map of transitions and returns a list of Transition messages. | |
| void | parse_state (std::string name, std::shared_ptr< yasmin::State > state, std::map< std::string, std::string > transitions, std::vector< yasmin_msgs::msg::State > &states_list, int parent) |
| Parses a state and its transitions to add it to the list of state messages. | |
| void | publish_data () |
| Publishes the data of the finite state machine to the associated ROS topic. | |
Private Attributes | |
| rclcpp::Node::SharedPtr | node_ |
| Shared pointer to the ROS 2 node. | |
| rclcpp::Publisher< yasmin_msgs::msg::StateMachine >::SharedPtr | publisher |
| Publisher for StateMachine messages. | |
| rclcpp::TimerBase::SharedPtr | timer |
| Timer for periodic publishing. | |
| std::string | fsm_name |
| Name of the finite state machine. | |
| std::shared_ptr< yasmin::StateMachine > | fsm |
| Shared pointer to the state machine. | |
Detailed Description
Publishes state machine data for visualization.
Constructor & Destructor Documentation
◆ YasminViewerPub() [1/2]
| YasminViewerPub::YasminViewerPub | ( | const rclcpp::Node::SharedPtr & | node, |
| std::string | fsm_name, | ||
| std::shared_ptr< yasmin::StateMachine > | fsm ) |
Constructs YasminViewerPub with a given ROS 2 node, state machine name, and state machine instance.
Constructs YasminViewerPub with a specific ROS node. If the node is nullptr, a singleton instance of YasminNode is used.
- Parameters
-
node Shared pointer to the ROS 2 node. fsm_name Name of the finite state machine. fsm Shared pointer to the StateMachine instance to be published.
◆ YasminViewerPub() [2/2]
| YasminViewerPub::YasminViewerPub | ( | std::string | fsm_name, |
| std::shared_ptr< yasmin::StateMachine > | fsm ) |
Constructs YasminViewerPub with a default ROS 2 node instance, state machine name, and state machine instance.
Constructs YasminViewerPub by delegating to another constructor with a nullptr node.
- Parameters
-
fsm_name Name of the finite state machine. fsm Shared pointer to the StateMachine instance to be published.
Member Function Documentation
◆ parse_state()
| void YasminViewerPub::parse_state | ( | std::string | state_name, |
| std::shared_ptr< yasmin::State > | state, | ||
| std::map< std::string, std::string > | transitions, | ||
| std::vector< yasmin_msgs::msg::State > & | states_list, | ||
| int | parent ) |
Parses a state and its transitions to add it to the list of state messages.
Parses a state and its transitions, adding it to the states list and handling nested FSMs if applicable.
- Parameters
-
name Name of the state to be parsed. state Shared pointer to the State instance. transitions Map of transitions associated with this state. states_list Vector to which the parsed State message will be added. parent ID of the parent state. state_name Name of the state. state Shared pointer to the State instance. transitions Map of transitions related to the state. states_list Reference to a vector of yasmin_msgs::msg::State to append parsed states. parent ID of the parent state; -1 for top-level states.
◆ parse_transitions()
| std::vector< yasmin_msgs::msg::Transition > YasminViewerPub::parse_transitions | ( | std::map< std::string, std::string > | transitions | ) |
Parses transitions from a map of transitions and returns a list of Transition messages.
Parses a map of transition pairs (outcome, state) to a vector of Transition messages.
- Parameters
-
transitions Map where keys are transition outcomes, and values are the next states.
- Returns
- Vector of Transition messages.
- Parameters
-
transitions Map containing transition outcomes as keys and next states as values.
- Returns
- Vector of yasmin_msgs::msg::Transition.
◆ publish_data()
| void YasminViewerPub::publish_data | ( | ) |
Publishes the data of the finite state machine to the associated ROS topic.
Publishes the state machine data if validation is successful.
- Exceptions
-
std::exception if state machine validation fails. std::exception Thrown if the state machine fails validation.
Member Data Documentation
◆ fsm
|
private |
Shared pointer to the state machine.
◆ fsm_name
|
private |
Name of the finite state machine.
◆ node_
|
private |
Shared pointer to the ROS 2 node.
◆ publisher
|
private |
Publisher for StateMachine messages.
◆ timer
|
private |
Timer for periodic publishing.
The documentation for this class was generated from the following files:
- yasmin_viewer/include/yasmin_viewer/yasmin_viewer_pub.hpp
- yasmin_viewer/src/yasmin_viewer/yasmin_viewer_pub.cpp
Generated by