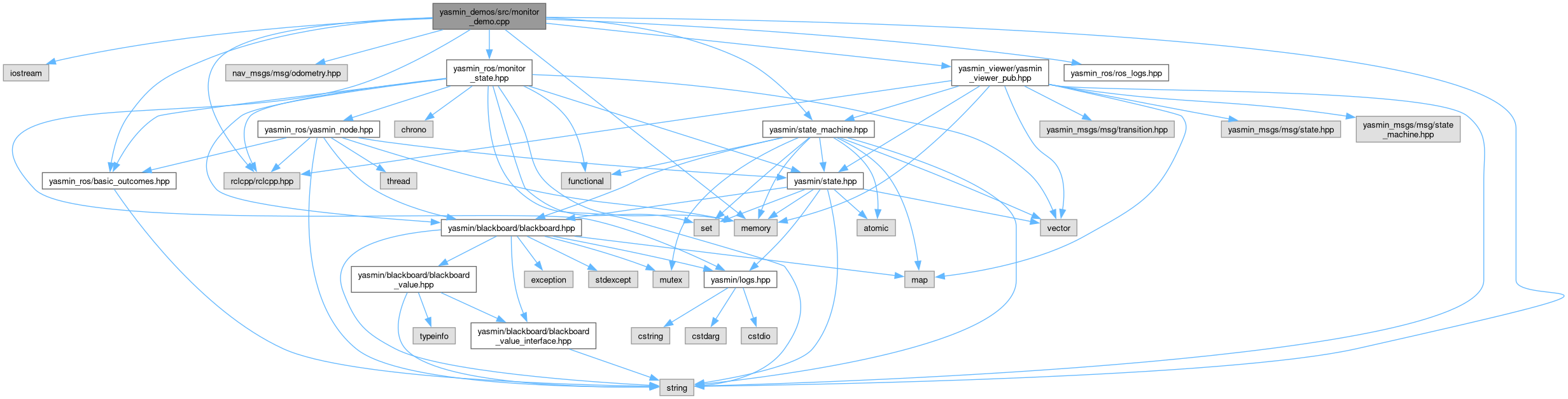
#include <iostream>#include <memory>#include <string>#include "nav_msgs/msg/odometry.hpp"#include "rclcpp/rclcpp.hpp"#include "yasmin/logs.hpp"#include "yasmin/state_machine.hpp"#include "yasmin_ros/basic_outcomes.hpp"#include "yasmin_ros/monitor_state.hpp"#include "yasmin_ros/ros_logs.hpp"#include "yasmin_viewer/yasmin_viewer_pub.hpp"
Include dependency graph for monitor_demo.cpp:
Classes | |
| class | PrintOdometryState |
| A state that monitors odometry data and transitions based on a specified count. More... | |
Functions | |
| int | main (int argc, char *argv[]) |
| Main function initializing ROS 2 and setting up the state machine. | |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char * | argv[] ) |
Main function initializing ROS 2 and setting up the state machine.
Initializes ROS 2, configures loggers, sets up the state machine with states and transitions, and starts monitoring odometry data. The state machine will cancel upon ROS 2 shutdown.
- Parameters
-
argc Argument count. argv Argument vector.
- Returns
- int Exit code.
- Exceptions
-
std::exception Catches and logs any exceptions thrown by the state machine.
Generated by