yasmin_demos.monitor_demo.PrintOdometryState Class Reference
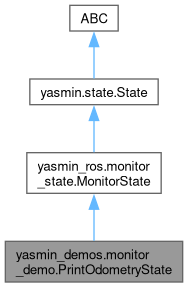
Inheritance diagram for yasmin_demos.monitor_demo.PrintOdometryState:
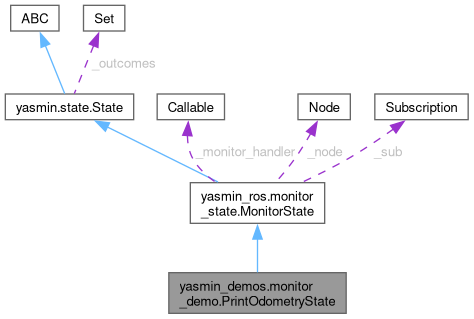
Collaboration diagram for yasmin_demos.monitor_demo.PrintOdometryState:
Public Member Functions | |
| None | __init__ (self, int times) |
| str | monitor_handler (self, Blackboard blackboard, Odometry msg) |
 Public Member Functions inherited from yasmin_ros.monitor_state.MonitorState Public Member Functions inherited from yasmin_ros.monitor_state.MonitorState | |
| str | execute (self, Blackboard blackboard) |
| Public Member Functions inherited from yasmin.state.State | |
| str | __call__ (self, Blackboard blackboard=None) |
| str | __str__ (self) |
| None | cancel_state (self) |
| bool | is_canceled (self) |
| bool | is_running (self) |
| Set[str] | get_outcomes (self) |
Public Attributes | |
| monitor_handler | |
| times = times | |
| Public Attributes inherited from yasmin_ros.monitor_state.MonitorState | |
| list | msg_list = [] |
| A set of messages received from the topic. | |
| int | msg_queue = msg_queue |
| The maximum number of messages to retain. | |
| float | time_to_wait = 0.001 |
| Time to wait between checks for messages. | |
| bool | monitoring = False |
| Flag indicating if monitoring is active. | |
Additional Inherited Members | |
| Protected Attributes inherited from yasmin_ros.monitor_state.MonitorState | |
| Callable[[Blackboard, Any], None] | _monitor_handler = monitor_handler |
| Function to handle incoming messages. | |
| int | _timeout = timeout |
| Timeout duration for monitoring. | |
| Node | _node = node |
| The ROS 2 node instance used for subscriptions. | |
| str | _topic_name = topic_name |
| The name of the topic to monitor. | |
| Subscription | _sub |
| Subscription object for the specified topic. | |
| Protected Attributes inherited from yasmin.state.State | |
| Set | _outcomes = set() |
| A set of valid outcomes for this state. | |
| bool | _running = False |
| A flag indicating whether the state is currently running. | |
| bool | _canceled = False |
| A flag indicating whether the state has been canceled. | |
Detailed Description
MonitorState subclass to handle Odometry messages.
This state monitors Odometry messages from the specified ROS topic,
logging them and transitioning based on the number of messages received.
Attributes:
times (int): The number of messages to monitor before transitioning
to the next outcome.
Parameters:
times (int): The initial count of how many Odometry messages to
process before changing state.
Methods:
monitor_handler(blackboard: Blackboard, msg: Odometry) -> str:
Handles incoming Odometry messages, logging the message and
returning the appropriate outcome based on the remaining count.
Constructor & Destructor Documentation
◆ __init__()
| None yasmin_demos.monitor_demo.PrintOdometryState.__init__ | ( | self, | |
| int | times ) |
Initializes the PrintOdometryState.
Parameters:
times (int): The number of Odometry messages to monitor before
transitioning to the next outcome.
Reimplemented from yasmin_ros.monitor_state.MonitorState.
Member Function Documentation
◆ monitor_handler()
| str yasmin_demos.monitor_demo.PrintOdometryState.monitor_handler | ( | self, | |
| Blackboard | blackboard, | ||
| Odometry | msg ) |
Handles incoming Odometry messages.
This method is called whenever a new Odometry message is received.
It logs the message, decrements the count of messages to process,
and determines the next state outcome.
Parameters:
blackboard (Blackboard): The shared data storage for states.
msg (Odometry): The incoming Odometry message.
Returns:
str: The next state outcome, either "outcome1" to continue
monitoring or "outcome2" to transition to the next state.
Exceptions:
None
Member Data Documentation
◆ monitor_handler
| yasmin_demos.monitor_demo.PrintOdometryState.monitor_handler |
◆ times
| yasmin_demos.monitor_demo.PrintOdometryState.times = times |
The documentation for this class was generated from the following file:
- yasmin_demos/yasmin_demos/monitor_demo.py
Generated by