Public Member Functions | |
| None | __init__ (self, Type action_type, str action_name, Callable create_goal_handler, Set[str] outcomes=None, Callable result_handler=None, Callable feedback_handler=None, Node node=None, float timeout=None) |
| None | cancel_state (self) |
| str | execute (self, Blackboard blackboard) |
 Public Member Functions inherited from yasmin.state.State Public Member Functions inherited from yasmin.state.State | |
| str | __call__ (self, Blackboard blackboard=None) |
| str | __str__ (self) |
| bool | is_canceled (self) |
| bool | is_running (self) |
| Set[str] | get_outcomes (self) |
Protected Member Functions | |
| None | _goal_response_callback (self, Future future) |
| None | _get_result_callback (self, Future future) |
Protected Attributes | |
| Event | _action_done_event = Event() |
| Event used to wait for action completion. | |
| Any | _action_result = None |
| The result returned by the action server. | |
| GoalStatus | _action_status = None |
| The status of the action execution. | |
| ClientGoalHandle | _goal_handle = None |
| Handle for the goal sent to the action server. | |
| RLock | _goal_handle_lock = RLock() |
| Lock to manage access to the goal handle. | |
| Callable[[Blackboard], Any] | _create_goal_handler = create_goal_handler |
| Function that creates the goal to send. | |
| Callable[[Blackboard, Any], str] | _result_handler = result_handler |
| Function to handle the result from the action server. | |
| Callable[[Blackboard, Any], None] | _feedback_handler = feedback_handler |
| Function to handle feedback from the action server. | |
| float | _timeout = timeout |
| Timeout duration for waiting for the action server. | |
| Node | _node = node |
| The ROS 2 node instance used to communicate with the action server. | |
| str | _action_name = action_name |
| The name of the action to be performed. | |
| ActionClient | _action_client |
| The action client used to send goals. | |
| _goal_response_callback | |
| _get_result_callback | |
| Protected Attributes inherited from yasmin.state.State | |
| Set | _outcomes = set() |
| A set of valid outcomes for this state. | |
| bool | _running = False |
| A flag indicating whether the state is currently running. | |
| bool | _canceled = False |
| A flag indicating whether the state has been canceled. | |
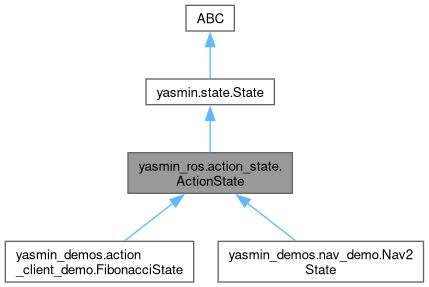
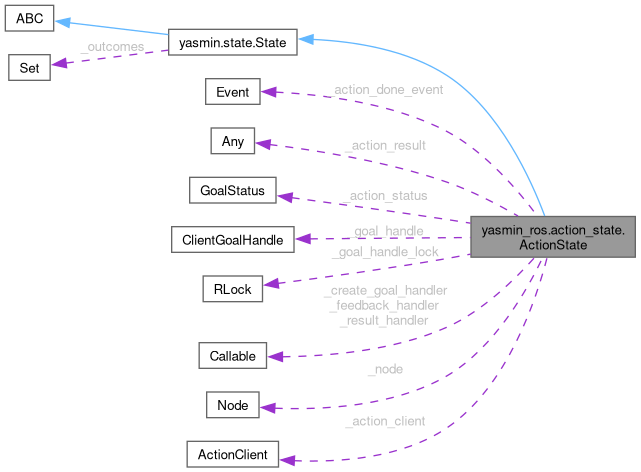
Detailed Description
Represents a state that interacts with a ROS 2 action server.
This class encapsulates the functionality needed to manage
the sending and receiving of goals to and from an action server.
Attributes:
_node (Node): The ROS 2 node instance used to communicate with the action server.
_action_name (str): The name of the action to be performed.
_action_client (ActionClient): The action client used to send goals.
_action_done_event (Event): Event used to wait for action completion.
_action_result (Any): The result returned by the action server.
_action_status (GoalStatus): The status of the action execution.
_goal_handle (ClientGoalHandle): Handle for the goal sent to the action server.
_goal_handle_lock (RLock): Lock to manage access to the goal handle.
_create_goal_handler (Callable[[Blackboard], Any]): Function that creates the goal to send.
_result_handler (Callable[[Blackboard, Any], str]): Function to handle the result from the action server.
_feedback_handler (Callable[[Blackboard, Any], None]): Function to handle feedback from the action server.
_timeout (float): Timeout duration for waiting for the action server.
Constructor & Destructor Documentation
◆ __init__()
| None yasmin_ros.action_state.ActionState.__init__ | ( | self, | |
| Type | action_type, | ||
| str | action_name, | ||
| Callable | create_goal_handler, | ||
| Set[str] | outcomes = None, | ||
| Callable | result_handler = None, | ||
| Callable | feedback_handler = None, | ||
| Node | node = None, | ||
| float | timeout = None ) |
Initializes the ActionState instance.
This constructor sets up the action client and prepares to handle goals.
Parameters:
action_type (Type): The type of the action to be executed.
action_name (str): The name of the action to be executed.
create_goal_handler (Callable[[Blackboard], Any])): A function that generates the goal.
outcomes (Set[str], optional): Additional outcomes that this state can return.
result_handler (Callable[[Blackboard, Any], str], optional): A function to process the result of the action.
feedback_handler (Callable[[Blackboard, Any], None], optional): A function to process feedback from the action.
node (Node, optional): The ROS 2 node to use. If None, uses the default YasminNode.
timeout (float, optional): Timeout duration for waiting for the action server.
Raises:
ValueError: If create_goal_handler is None.
Reimplemented from yasmin.state.State.
Reimplemented in yasmin_demos.action_client_demo.FibonacciState, and yasmin_demos.nav_demo.Nav2State.
Member Function Documentation
◆ _get_result_callback()
|
protected |
Callback to handle the result of the executed action.
This method sets the action result and status, and signals that the action is done.
Parameters:
future: The future object representing the result of the action execution.
◆ _goal_response_callback()
|
protected |
Callback to handle the response from sending a goal.
This method retrieves the goal handle and sets up the result callback.
Parameters:
future: The future object representing the result of the goal sending operation.
◆ cancel_state()
| None yasmin_ros.action_state.ActionState.cancel_state | ( | self | ) |
Cancels the current action state. This method cancels the goal sent to the action server, if it exists.
Reimplemented from yasmin.state.State.
◆ execute()
| str yasmin_ros.action_state.ActionState.execute | ( | self, | |
| Blackboard | blackboard ) |
Executes the action state by sending a goal to the action server.
This method waits for the action server to be available, sends the goal,
and waits for the action to complete, handling feedback and results.
Parameters:
blackboard (Blackboard): The blackboard instance used for state management.
Returns:
str: The outcome of the action execution (e.g., SUCCEED, ABORT, CANCEL, TIMEOUT).
Raises:
Exception: Raises an exception if any error occurs during action execution.
Reimplemented from yasmin.state.State.
Member Data Documentation
◆ _action_client
|
protected |
The action client used to send goals.
◆ _action_done_event
|
protected |
Event used to wait for action completion.
◆ _action_name
|
protected |
The name of the action to be performed.
◆ _action_result
|
protected |
The result returned by the action server.
◆ _action_status
|
protected |
The status of the action execution.
◆ _create_goal_handler
|
protected |
Function that creates the goal to send.
◆ _feedback_handler
|
protected |
Function to handle feedback from the action server.
◆ _get_result_callback
|
protected |
◆ _goal_handle
|
protected |
Handle for the goal sent to the action server.
◆ _goal_handle_lock
|
protected |
Lock to manage access to the goal handle.
◆ _goal_response_callback
|
protected |
◆ _node
|
protected |
The ROS 2 node instance used to communicate with the action server.
◆ _result_handler
|
protected |
Function to handle the result from the action server.
◆ _timeout
|
protected |
Timeout duration for waiting for the action server.
The documentation for this class was generated from the following file:
- yasmin_ros/yasmin_ros/action_state.py
Generated by