Public Member Functions |
Public Attributes |
Protected Member Functions |
Protected Attributes |
List of all members
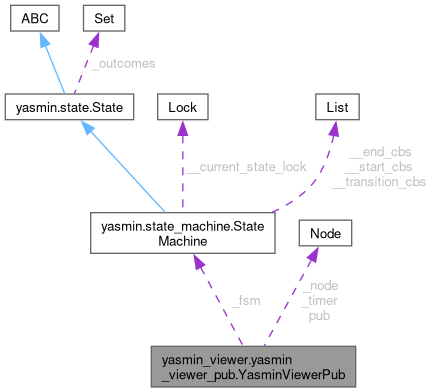
yasmin_viewer.yasmin_viewer_pub.YasminViewerPub Class Reference
Collaboration diagram for yasmin_viewer.yasmin_viewer_pub.YasminViewerPub:
Public Member Functions | |
| None | __init__ (self, str fsm_name, StateMachine fsm, int rate=4, Node node=None) |
| List[TransitionMsg] | parse_transitions (self, Dict[str, str] transitions) |
| None | parse_state (self, str state_name, Dict[str, str] state_info, List[StateMsg] states_list, int parent=-1) |
Public Attributes | |
| Node | pub = self._node.create_publisher(StateMachineMsg, "/fsm_viewer", 10) |
| The publisher for the state machine messages. | |
Protected Member Functions | |
| None | _publish_data (self) |
Protected Attributes | |
| StateMachine | _fsm = fsm |
| The finite state machine to be published. | |
| str | _fsm_name = fsm_name |
| The name of the finite state machine. | |
| Node | _node = node |
| The ROS 2 node instance used for publishing. | |
| Node | _timer = self._node.create_timer(1 / rate, self._publish_data) |
| A timer to periodically publish the FSM state. | |
Detailed Description
A class to publish the state of a Finite State Machine (FSM) for visualization.
Attributes:
_node (Node): The ROS 2 node instance used for publishing.
_fsm (StateMachine): The finite state machine to be published.
_fsm_name (str): The name of the finite state machine.
pub: The publisher for the state machine messages.
_timer: A timer to periodically publish the FSM state.
Methods:
parse_transitions(transitions): Converts a dictionary of transitions to a list of TransitionMsg.
parse_state(state_name, state_info, states_list, parent): Parses a state and its children recursively.
_publish_data(): Publishes the current state of the FSM.
Constructor & Destructor Documentation
◆ __init__()
| None yasmin_viewer.yasmin_viewer_pub.YasminViewerPub.__init__ | ( | self, | |
| str | fsm_name, | ||
| StateMachine | fsm, | ||
| int | rate = 4, | ||
| Node | node = None ) |
Initializes the YasminViewerPub instance.
Args:
fsm_name (str): The name of the FSM.
fsm (StateMachine): The FSM instance to be published.
rate (int): The rate in Hz at which to publish updates. Defaults to 4.
node (Node, optional): A custom Node instance. If None, a new YasminNode is created.
Raises:
ValueError: If fsm_name is empty.
Member Function Documentation
◆ _publish_data()
|
protected |
Publishes the current state of the FSM.
This method validates the FSM, gathers its state data, and publishes it.
If validation fails, an error message is logged.
Returns:
None
Raises:
Exception: If the FSM validation fails, an error is logged and the function exits without publishing.
◆ parse_state()
| None yasmin_viewer.yasmin_viewer_pub.YasminViewerPub.parse_state | ( | self, | |
| str | state_name, | ||
| Dict[str, str] | state_info, | ||
| List[StateMsg] | states_list, | ||
| int | parent = -1 ) |
Recursively parses a state and its transitions, adding the resulting StateMsg to the states list.
Args:
state_name (str): The name of the state.
state_info (Dict[str, str]): Information about the state, including its transitions.
states_list (List[StateMsg]): A list to which the parsed StateMsg will be appended.
parent (int, optional): The ID of the parent state. Defaults to -1.
Returns:
None
◆ parse_transitions()
| List[TransitionMsg] yasmin_viewer.yasmin_viewer_pub.YasminViewerPub.parse_transitions | ( | self, | |
| Dict[str, str] | transitions ) |
Converts a dictionary of transitions into a list of TransitionMsg.
Args:
transitions (Dict[str, str]): A dictionary where keys are outcome names and values are state names.
Returns:
List[TransitionMsg]: A list of TransitionMsg representing the FSM transitions.
Member Data Documentation
◆ _fsm
|
protected |
The finite state machine to be published.
◆ _fsm_name
|
protected |
The name of the finite state machine.
◆ _node
|
protected |
The ROS 2 node instance used for publishing.
◆ _timer
|
protected |
A timer to periodically publish the FSM state.
◆ pub
| Node yasmin_viewer.yasmin_viewer_pub.YasminViewerPub.pub = self._node.create_publisher(StateMachineMsg, "/fsm_viewer", 10) |
The publisher for the state machine messages.
The documentation for this class was generated from the following file:
- yasmin_viewer/yasmin_viewer/yasmin_viewer_pub.py
Generated by