yasmin_ros::GetParametersState Class Reference
State that retrieves parameters from the ROS 2 parameter server. More...
#include <get_parameters_state.hpp>
Inheritance diagram for yasmin_ros::GetParametersState:
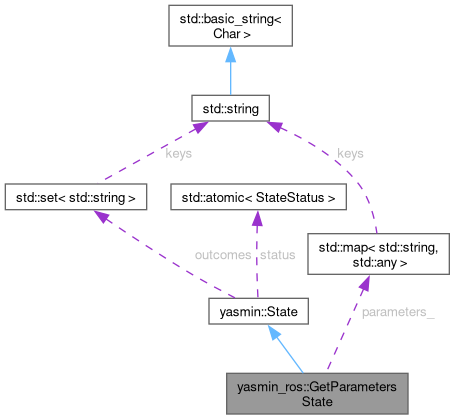
Collaboration diagram for yasmin_ros::GetParametersState:
Public Member Functions | |
| GetParametersState (const std::map< std::string, std::any > ¶meters, rclcpp::Node::SharedPtr node=nullptr) | |
| Constructs a GetParametersState with a map of parameters. | |
| std::string | execute (std::shared_ptr< yasmin::blackboard::Blackboard > blackboard) override |
| Executes the state to retrieve parameters. | |
 Public Member Functions inherited from yasmin::State Public Member Functions inherited from yasmin::State | |
| State (const std::set< std::string > &outcomes) | |
| Constructs a State with a set of possible outcomes. | |
| StateStatus | get_status () const |
| Gets the current status of the state. | |
| bool | is_idle () const |
| Checks if the state is idle. | |
| bool | is_running () const |
| Checks if the state is currently running. | |
| bool | is_canceled () const |
| Checks if the state has been canceled. | |
| bool | is_completed () const |
| Checks if the state has completed execution. | |
| std::string | operator() (std::shared_ptr< blackboard::Blackboard > blackboard) |
| Executes the state and returns the outcome. | |
| virtual void | cancel_state () |
| Cancels the current state execution. | |
| std::set< std::string > const & | get_outcomes () |
| Gets the set of possible outcomes for this state. | |
| virtual std::string | to_string () |
| Converts the state to a string representation. | |
Private Attributes | |
| std::map< std::string, std::any > | parameters_ |
| rclcpp::Node::SharedPtr | node_ |
| Shared pointer to the ROS 2 node. | |
Additional Inherited Members | |
| Protected Attributes inherited from yasmin::State | |
| std::set< std::string > | outcomes |
| The possible outcomes of this state. | |
Detailed Description
State that retrieves parameters from the ROS 2 parameter server.
This state retrieves parameters from the ROS 2 parameter server and stores them in the blackboard.
Constructor & Destructor Documentation
◆ GetParametersState()
| GetParametersState::GetParametersState | ( | const std::map< std::string, std::any > & | parameters, |
| rclcpp::Node::SharedPtr | node = nullptr ) |
Constructs a GetParametersState with a map of parameters.
- Parameters
-
parameters A map of parameter names to their default values. node A shared pointer to the ROS 2 node.
Member Function Documentation
◆ execute()
|
overridevirtual |
Executes the state to retrieve parameters.
- Parameters
-
blackboard A reference to the Yasmin blackboard.
- Returns
- A string representing the outcome of the execution.
Reimplemented from yasmin::State.
Member Data Documentation
◆ node_
|
private |
Shared pointer to the ROS 2 node.
◆ parameters_
|
private |
Map of parameters to retrieve, where the key is the parameter name and the value is the default value.
The documentation for this class was generated from the following files:
- yasmin_ros/include/yasmin_ros/get_parameters_state.hpp
- yasmin_ros/src/yasmin_ros/get_parameters_state.cpp
Generated by