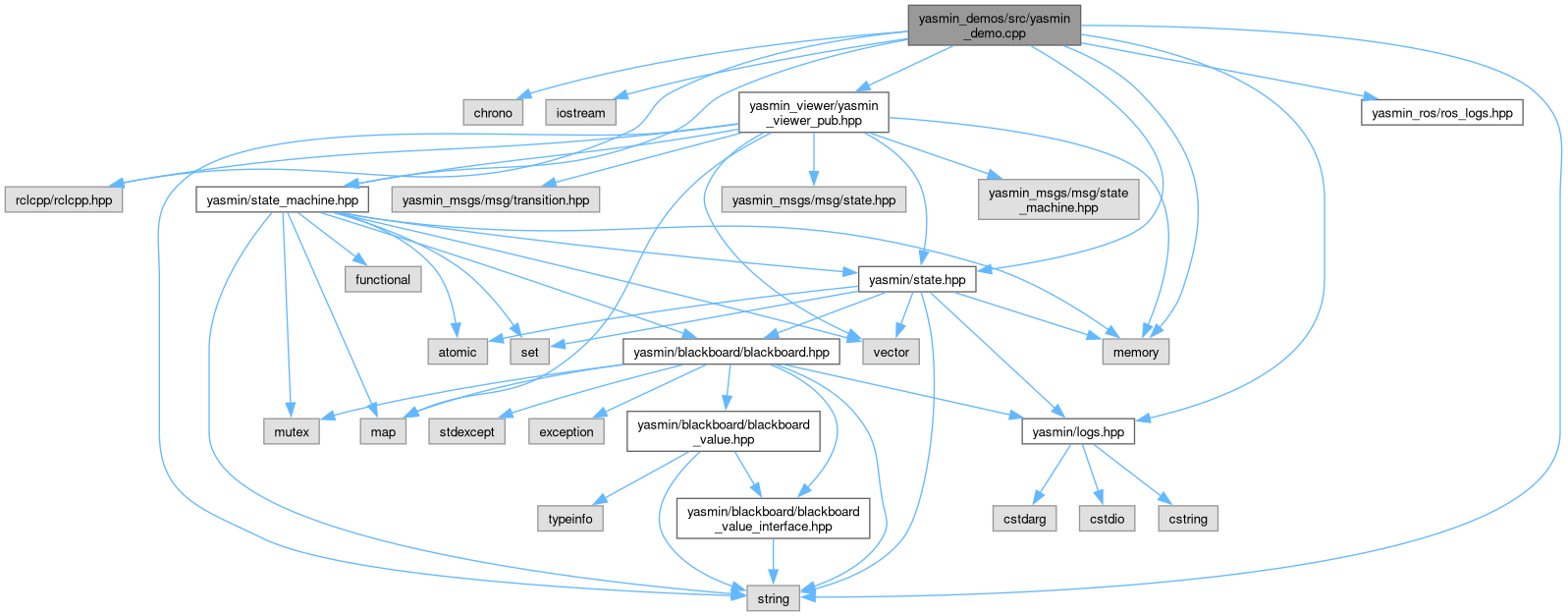
#include <chrono>#include <iostream>#include <memory>#include <string>#include "rclcpp/rclcpp.hpp"#include "yasmin/logs.hpp"#include "yasmin/state.hpp"#include "yasmin/state_machine.hpp"#include "yasmin_ros/ros_logs.hpp"#include "yasmin_viewer/yasmin_viewer_pub.hpp"
Include dependency graph for yasmin_demo.cpp:
Classes | |
| class | FooState |
| Represents the "Foo" state in the state machine. More... | |
| class | BarState |
| Represents the "Bar" state in the state machine. More... | |
Functions | |
| int | main (int argc, char *argv[]) |
| Main function that initializes the ROS 2 node and state machine. | |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char * | argv[] ) |
Main function that initializes the ROS 2 node and state machine.
This function sets up the state machine, adds states, and handles the execution flow, including logging and cleanup.
- Parameters
-
argc Argument count from the command line. argv Argument vector from the command line.
- Returns
- int Exit status of the program. Returns 0 on success.
- Exceptions
-
std::exception If there is an error during state machine execution.
Generated by